- 文档大小:305.76 KB
- 文档格式:pdf
- 约 5页
- 2022-03-26 发布
- 举报
已阅读完毕,您还可以下载文档进行保存
- 1、本文档共5页,内容下载后可编辑。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
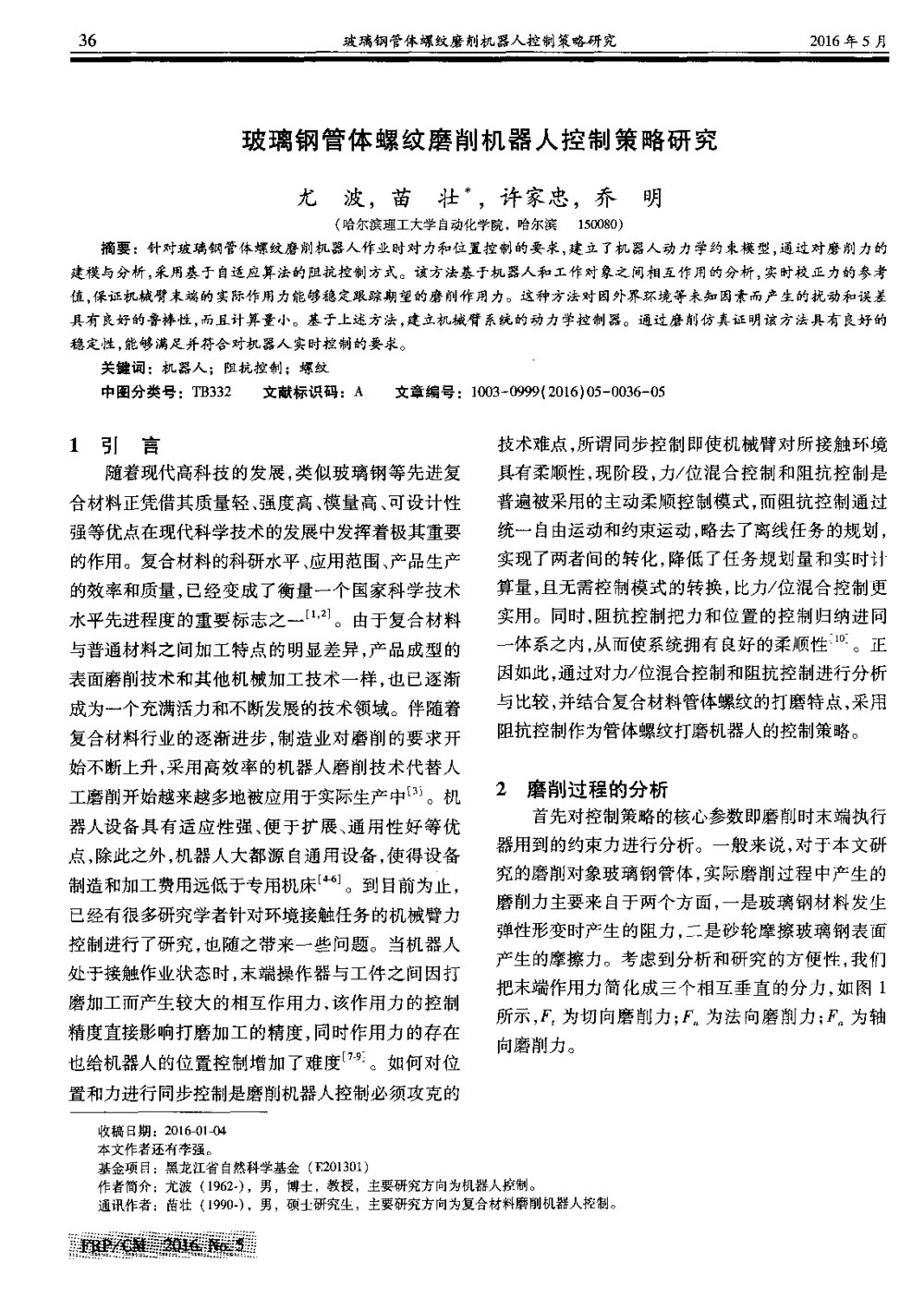
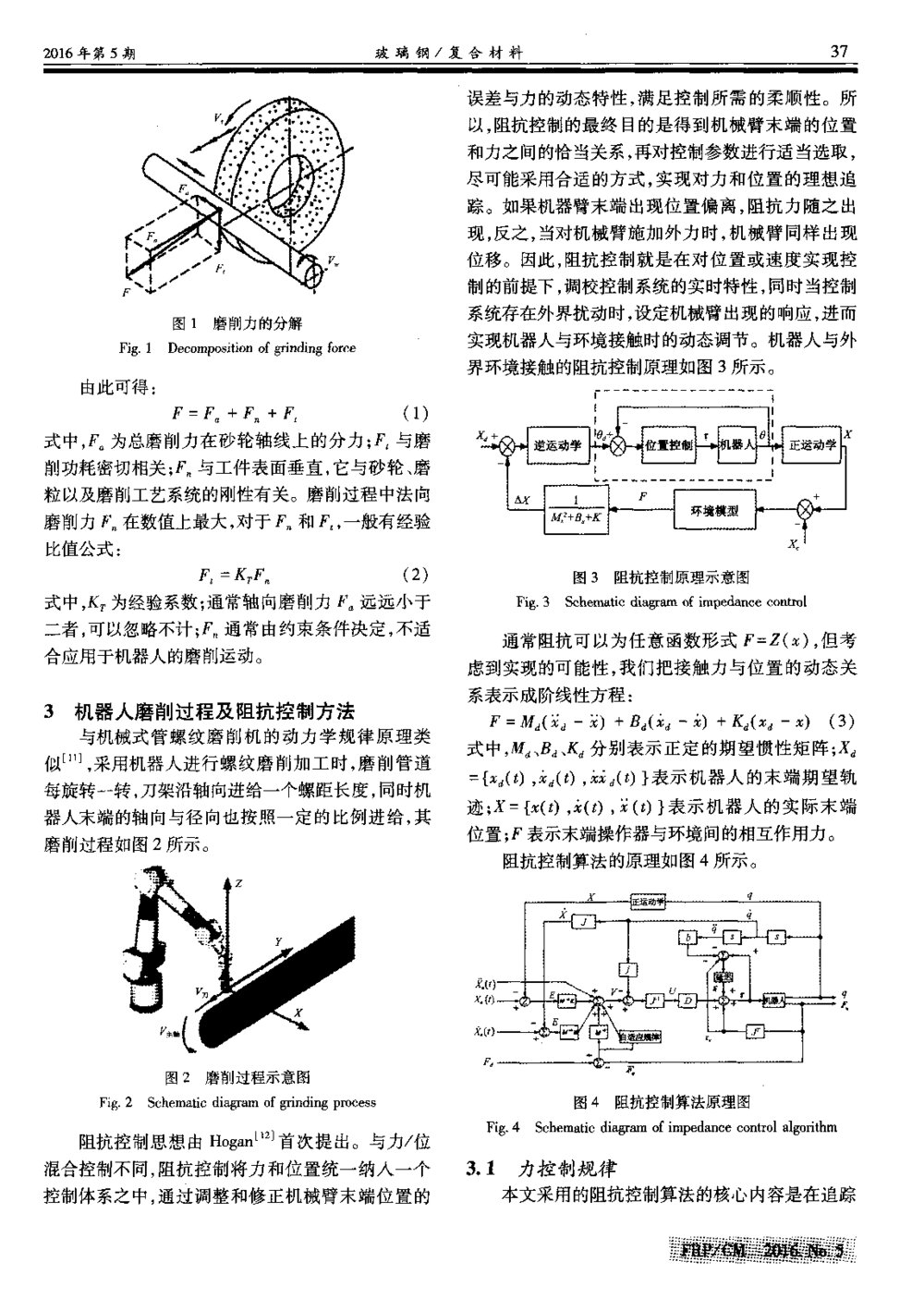
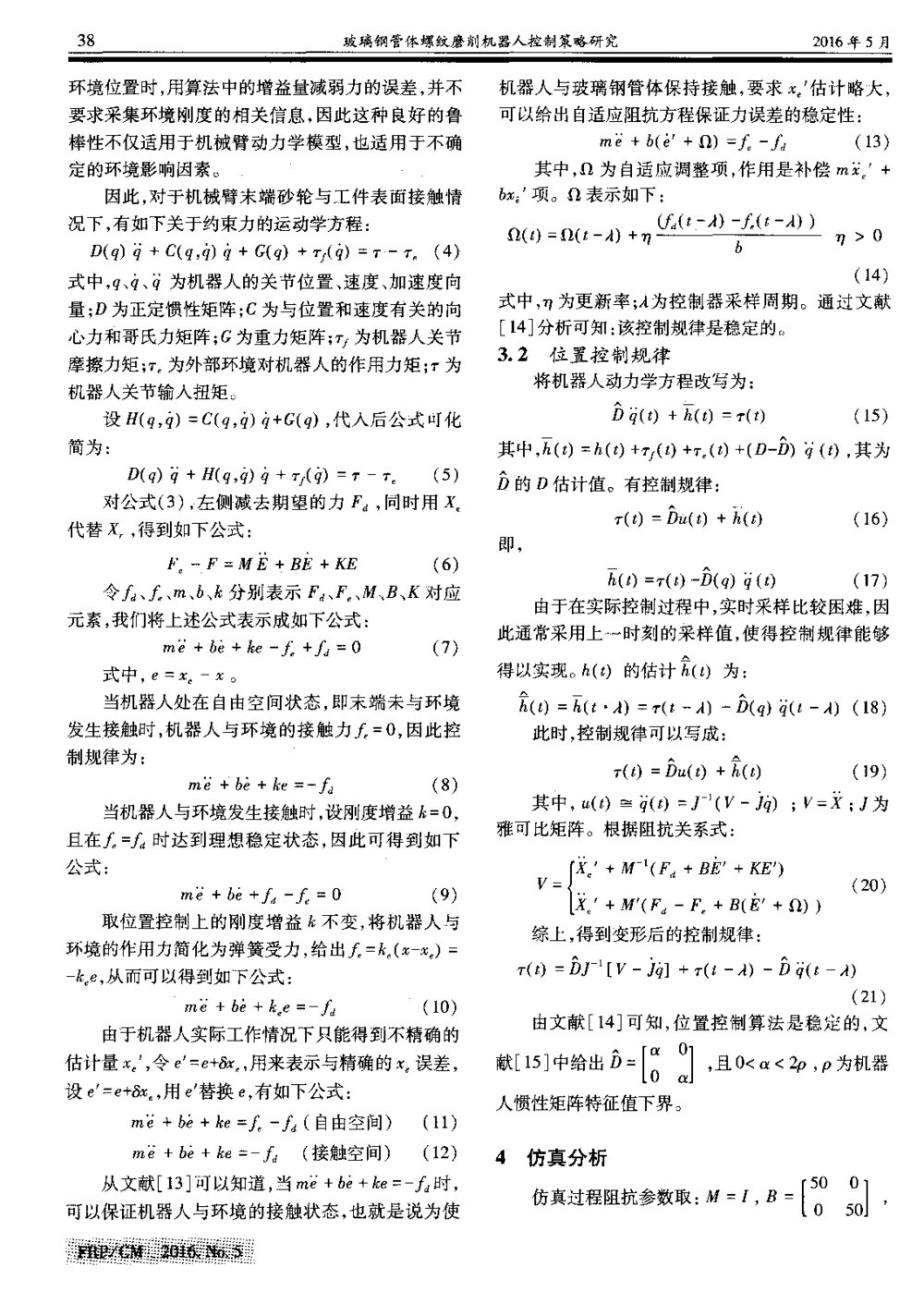
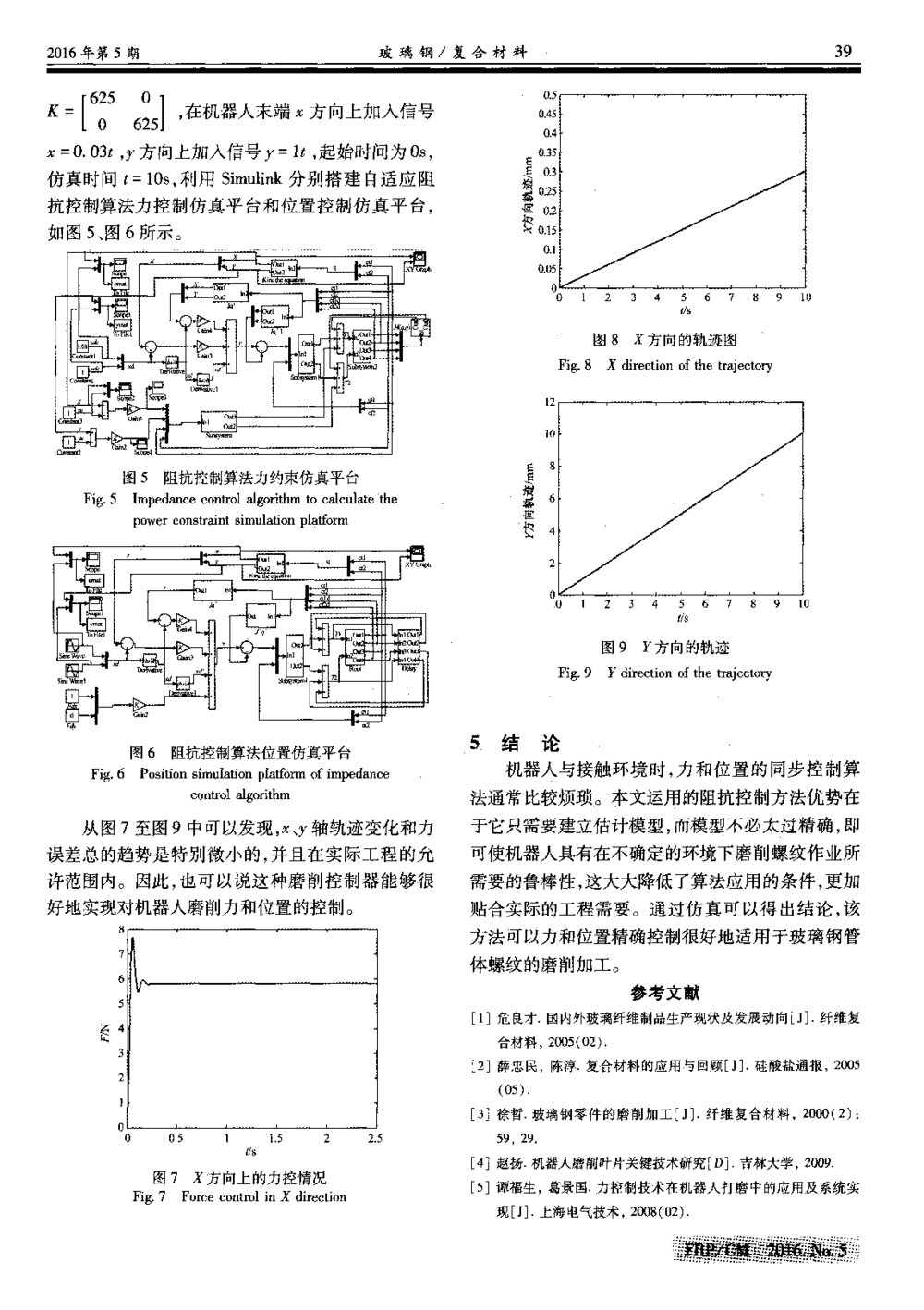
36 玻璃钢管体螺纹磨削机器人控制策略研究 2016年5月 玻璃钢管体螺纹磨削机器人控制策略研究 尤波,苗壮,许家忠,乔明 (哈尔滨理工大学自动化学院,哈尔滨150080) 摘要:针对玻璃钢管体螺纹磨削机器人作业时对力和位置控制的要求,建立了机器人动力学约束模型,通过对磨削力的 建模与分析,采用基于自适应算法的阻抗控制方式。该方法基于机器人和工作对象之间相互作用的分析,实时校正力的参考 值,保证机械臂末端的实际作用力能够稳定跟踪期望的磨削作用力。这种方法对因外界环境等未知因素而产生的扰动和误差 具有良好的鲁棒性,而且计算量小。基于上述方法,建立机械臂系统的动力学控制器。通过磨削仿真证明该方法具有良好的 稳定性,能够满足并符合对机器人实时控制的要求。 关键词:机器人;阻抗控制;螺纹 中图分类号:TB332文献标识码:A文章编号:1003-0999(2016)05-0036-05 1引言 随着现代高科技的发展,类似玻璃钢等先进复 合材料正凭借其质量轻、强度高、模量高、可设计性 强等优点在现代科学技术的发展中发挥着极其重要 的作用。复合材料的科研水平、应用范围、产品生产 的效率和质量,已经变成了衡量一个国家科学技术’ 水平先进程度的重要标志之一_l引。由于复合材料 与普通材料之间加工特点的明显差异,产品成型的 表面磨削技术和其他机械加工技术一样,也已逐渐 成为一个充满活力和不断发展的技术领域。伴随着 复合材料行业的逐渐进步,制造业对磨削的要求开 始不断上升,采用高效率的机器人磨削技术代替人 工磨削开始越来越多地被应用于实际生产中j。机 器人设备具有适应性强、便于扩展、通用性好等优 点,除此之外,机器人大都源自通用设备,使得设备 制造和加工费用远低于专用机床。到目前为止, 已经有很多研究学者针对环境接触任务的机械臂力 控制进行了研究,也随之带来一些问题。当机器人 处于接触作业状态时,末端操作器与工件之间因打 磨加工而产生较大的相互作用力,该作用力的控制 精度直接影响打磨加工的精度,同时作用力的存在 也给机器人的位置控制增加了难度J。如何对位 置和力进行同步控制是磨削机器人控制必须攻克的 技术难点,所谓同步控制即使机械臂对所接触环境 具有柔顺性,现阶段,力/位混合控制和阻抗控制是 普遍被采用的主动柔顺控制模式,而阻抗控制通过 统一自由运动和约束运动,略去了离线任务的规划, 实现了两者间的转化,降低了任务规划量和实时计 算量,且无需控制模式的转换,比力/位混合控制更 实用。同时,阻抗控制把力和位置的控制归纳进同一 体系之内,从而使系统拥有良好的柔顺性。正 因如此,通过对力/位混合控制和阻抗控制进行分析 与比较,并结合复合材料管体螺纹的打磨特点,采用 阻抗控制作为管体螺纹打磨机器人的控制策略。 2磨削过程的分析 首先对控制策略的核心参数即磨削时末端执行 器用到的约束力进行分析。一般来说,对于本文研 究的磨削对象玻璃钢管体,实际磨削过程中产生的 磨削力主要来自于两个方面,一是玻璃钢材料发生 弹性形变时产生的阻力,二是砂轮摩擦玻璃钢表面 产生的摩擦力。考虑到分析和研究的方便性,我们 把末端作用力简化成三个相互垂直的分力,如图1 所示,F为切向磨削力;F为法向磨削力;F。为轴 向磨削力。 —— 收稿日期:20160104 本文作者还有李强。 基金项目:黑龙江省自然科学基金(E201301) 作者简介:尤波(1962-),男,博士,教授,主要研究方向为机器人控制。 通讯作者:苗壮(1990.),男,硕士研究生,主要研究方向为复合材料磨削机器人控制。 2016年第5期 玻璃钢/复合材料 37 图1磨削力的分解 Fig.1Decompositionofgrindingforce 由此可得: F=F。+F+F (1) 式中,F为总磨削力在砂轮轴线上的分力;F与磨 削功耗密切相关;F与工件表面垂直,它与砂轮、磨 粒以及磨削工艺系统的刚性有关。磨削过程中法向 磨削力F在数值上最大,对于F和F,一般有经验 比值公式: F=KF (2) 式中,K为经验系数;通常轴向磨削力F。远远小于 二者,可以忽略不计;F通常由约束条件决定,不适 合应用于机器人的磨削运动。 3机器人磨削过程及阻抗控制方法 与机械式管螺纹磨削机的动力学规律原理类 似,采用机器人进行螺纹磨削加工时,磨削管道 每旋转一转,刀架沿轴向进给一个螺距长度,同时机 器人末端的轴向与径向也按照一定的比例进给,其 磨削过程如图2所示。 图2磨削过程示意图 Fig.2Schematicdiagramofgrindingprocess 阻抗控制思想由Hogan他首次提出。与力/位 混合控制不同,阻抗控制将力和位置统一纳入一个 控制体系之中,通过调整和修正机械臂末端位置的 误差与力的动态特性,满足控制所需的柔顺性。所 以,阻抗控制的最终目的是得到机械臂末端的位置 和力之间的恰当关系,再对控制参数进行适当选取, 尽可能采用合适的方式,实现对力和位置的理想追 踪。如果机器臂末端出现位置偏离,阻抗力随之出 现,反之,当对机械臂施加外力时,机械臂同样出现 位移。因此,阻抗控制就是在对位置或速度实现控 制的前提下,调校控制系统的实时特性,同时当控制 系统存在外界扰动时,设定机械臂出现的响应,进而 实现机器人与环境接触时的动态调节。机器人与外 界环境接触的阻抗控制原理如图3所示。 r一一一一一一一一一一一一一一~一一 图3阻抗控制原理不意图 Fig.3Schematicdiagramofimpedancecontrol 通常阻抗可以为任意函数形式F=Z(戈),但考 虑到实现的可能性,我们把接触力与位置的动态关 系表示成阶线性方程: — F=Md(d一)+Bd(d一)+Kd(d)(3) 式中,、B 分别表示正定的期望惯性矩阵;X ={(t),d(t),d(t))表示机器人的末端期望轨 迹;=(t),(t),(t))表示机器人的实际末端 位置;F表示末端操作器与环境间的相互作用力。 阻抗控制算法的原理如图4所示。 置(r) ( 兄(r) Fd 图4阻抗控制算法原理图 Fig.4Schematicdiagramofimpedancecontrolalgorithm 3.1力控制规律 本文采用的阻抗控制算法的核心内容是在追踪 38 玻璃钢管体螺纹磨削机器人控制策略研究 2016年5月 环境位置时,用算法中的增益量减弱力的误差,并不 要求采集环境刚度的相关信息,因此这种良好的鲁 棒性不仅适用于机械臂动力学模型,也适用于不确 定的环境影响因素。 因此,对于机械臂末端砂轮与工件表面接触情 况下,有如下关于约束力的运动学方程: D(g)+C(q,毒)+G(q)+rf(毒)=丁一(4) 式中'g、白、为机器人的关节位置、速度、加速度向 量;D为正定惯性矩阵;C为与位置和速度有关的向 心力和哥氏力矩阵;G为重力矩阵;rf为机器人关节 摩擦力矩;r为外部环境对机器人的作用力矩;为 机器人关节输入扭矩。 设H(q,由)=C(q,审)毒+G(口),代人后公式可化 简为: D(q)+H(q,奇)+,(毒)=丁一 (5) 对公式(3),左侧减去期望的力,同时用 代替,,得到如下公式:— F=ME+BE+KE (6) 令、、m、b、k分别表示、、、曰、K对应 元素,我们将上述公式表示成如下公式: ,n+6+后e一+=0 (7) 中,e=一。 当机器人处在自由空间状态,即末端未与环境 发生接触时,机器人与环境的接触力=0,因此控 制规律为: me+6+ke=一 (8) 当机器人与环境发生接触时,设刚度增益k=0, 且在=时达到理想稳定状态,因此可得到如下 公式: m+6+一=0 (9) 取位置控制上的刚度增益k不变,将机器人与 环境的作用力简化为弹簧受力,给出=k(一)=一 kee,从而可以得到如下公式: m+6+kee=一 (10) 由于机器人实际工作情况下只能得到不精确的 估计量,令e=e+Sx,用来表示与精确的误差, 设e=e+Sx,用e替换e,有如下公式: m+6+ke=一(自由空间)(11) me++ke=一 (接触空间)(12) 从文献[13]可以知道,当m+6+ke=一时, 可以保证机器人与环境的接触状态,也就是说为使≮ 机器人与玻璃钢管体保持接触,要求估计略大, 可以给出自适应阻抗方程保证力误差的稳定性: m+b(+Q)=一 (13) 其中,Q为自适应调整项,作用是补偿mx+ ; 项。Q表示如下: Q(f):12(一/i)+叼 _=二 叼>0 (14) 式中,为更新率;/l为控制器采样周期。通过文献 [14]分析可知:该控制规律是稳定的。 3.2位置控制规律 将机器人动力学方程改写为: D(t)+h(t)=.r(t) (15) — 其中,h(t)=h(t)+r(t)+丁(t)+(DD)(t),其为 D的JD估计值。有控制规律: (t)=Du(t)+h(t) (16) 即, h(t)=(t)一D(9)(t) (17) 由于在实际控制过程中,实时采样比较困难,因 此通常采用上一时刻的采样值,使得控制规律能够 得以实现。h(t)的估计h(t)为:△ 一 ^ h(t)=h(t・/1)=r(t一/1)一D(q)(一)(18) 此时,控制规律可以写成: (t)=Du(t)+(t) (19) — 其中,u(t)兰(t)=J(Jq);V=X;J为 雅可比矩阵。根据阻抗关系式:: 』州朋 (20) — 【+(Fd+B(E+n)) 综上,得到变形后的控制规律: (t)=Dj一[一乃]+(一/i)一D(t一) (21) 由文献[14]可知,位置控制算法是稳定的,文 献[15]中给出=[兰],且。<<2p,p为机器 人惯性矩阵特征值下界。 4仿真分析 仿真过程阻抗参数取:=,,=[ 2016年第5期 玻璃钢/复合材料 39 K=[565】,在机器人末端方向上加入信号 =0.03t,Y方向上加人信号,,=it,起始时间为Os, 仿真时间t=lOs,利用Simulink分别搭建自适应阻 抗控制算法力控制仿真平台和位置控制仿真平台, 如图5、图6所示。 图5阻抗控制算法力约束仿真平台 Fig.5Impedancecontrolalgorithmtoca lculatethe powerconstraintsimulationplatform 图6阻抗控制算法位置仿真平台 Fig.6Positionsimulationplatfor mofimpedance controlalgorithm 从图7至图9中可以发现,、Y轴轨迹变化和力 误差总的趋势是特别微小的,并且在实际工程的允 许范围内。因此,也可以说这种磨削控制器能够很 好地实现对机器人磨削力和位置的控制。 图7方向上的力控情况 Fig.7ForcecontrolinXdirection 图8X方向的轨迹图 Fig.8Xdirectionofthet阳jectory 图9Y方向的轨迹 Fig.9Ydirectionofthetrajectory 5结论 机器人与接触环境时,力和位置的同步控制算 法通常比较烦琐。本文运用的阻抗控制方法优势在 于它只需要建立估计模型,而模型不必太过精确,即 可使机器人具有在不确定的环境下磨削螺纹作业所 需要的鲁棒性,这大大降低了算法应用的条件,更加 贴合实际的工程需要。通过仿真可以得出结论,该 方法可以力和位置精确控制很好地适用于玻璃钢管 体螺纹的磨削加工。 参考文献 [1]危良才.国内外玻璃纤维制品生产现状及发展动向[J].纤维复 合材料,2005(02). [2]薛忠民,陈淳.复合材料的应用与回顾[J].硅酸盐通报,2005 (05). [3]徐哲.玻璃钢零件的磨削加工[J].纤维复合材料,2000(2): 59.29. [4]赵扬.机器人磨削叶片关键技术研究[D].吉林大学,2009. [5]谭福生,葛景国.力控制技术在机器人打磨中的应用及系统实 现[J].海电气技术,2008(02). 晦蛹簿 l\器露椒 g叫/器匠壑 玻璃钢管体螺纹磨削机器人控制策略研究 2016年5月 — — [6]XuYangsheng.Intelligentrobotsleadinghightechdevelopment [N].ChinaScienceDaily,August12,2010. — [7]HuangYongan,XiongCai-hua,XiongYou ̄un.Researchstatus anddevelopmenttrendsofintelligentrobotandapplication[J].In・ — ternationalAcademicDevelopments,2009(4):3839. — — [8]WangTianran,QuDaokui.Opensystemarchitectureforcontrol systemforindustrialr— obot[J].Robot,2002,24(3):256261. [9]TanMin,XuDe,HouZeng-g uang,eta1.AdvancedRobotControl [J].HJgherEducationPress,2007. [10]KazerooniH,HouptPK,SheridanTB.RobustCompliantMotion forManipulators.PartI:TheFundamentalConceptsofCompliant Motion.PartII:DesignMethods[J].IEEEJRoboticAutomat,— 1986,RA一2(2):83105. [11]张小亮,张宏文.国内外的螺纹标准和螺纹加工[J].机械工程 — 师,2006(4):113114. [12]HoganN.ImpedanceControlAnApproachToManipulation:Part — — I-theory,PartIIimplementation,PartIIIApplcation[J].JDyn SysMeasCont,1985,1-24. [13]SealJung,T.C.Hsia,R.G.Boni ̄.ForceTrackingImpedance Controlf orRobotManipulatorswithanUnknownEnvir onment:Theor y,Simulation,andExperiment[J].InternationalJournalof — RoboticResearch,2001,20(9):765774. [14]SeulJung,T.C.Hsia,R.G.Bonitz.ForceTrackingImpedance ControlofRobotManipulatorsUnderUnknownEnvironment[J]. IEEETransactiononControlSystemsTechnology,2004,12(3):— 474483. [15]c.Hsia.SimplerobustschemesforCartesianspacecontrolofrobotmanipulator s.Int.J.Robot[J].Automat,1994,9(4):167-174. ’ ’’ STUDYoNTHECoN-IRoLSTRATEGYoFTHEGLASSPIPETHREADGRINDINGRoBoI — YOUBo,MIAOZhuang,XUJiazhong,QIAOMing (DepartmentofAutomationHarbinUniversityofScienceandTechnology,Harbin150080,China) Abstract:Fortherequirementsofforceandpositioncontroloftherobotintheprocessofthethreadgrinding operations,thedynamicconstraintmodeloftherobotisestablished.Throughonthemodelingandanalysisofgrind- — ingforce,theimpedancecontrolmethodbasedontheadaptivealgorithmisadopted.Themethodisbasedonthea nalysisoftheinteractionbetweentherobotandtheworkingobject.Then,wecancorrectthereferencevalueofthef orceinrealtimeandtheamountofactualforceattheendoftherobotariacanbeensuredtostabilizethedesired grindingforce.T — hismethodhasagoodrobustnessforthedisturbancesanderrorsarisingfromtheexternalenviron mentandotherunknownfactors,andtheamountofcomputationissmal1.Basedontheabovemethod,thedynamic controllerofthemanipulatorsystemisestablished.Thesimulationresultsshowthatthemethodhasgoodstability, — andcanmeettherequirementsofrealtimecontroloftherobot. Keywords:robot;impedancecontrol;thread
您可能关注的文档
- “离位”增韧复合材料准静态压入损伤特性研究.pdf
- “神舟七号”飞船舱外航天服防护头盔组件的研制.pdf
- “十二五”复合材料发展重点和方向解读.pdf
- “珠串”堆叠超结构的介孔铁酸锌的制备与表征.pdf
- (001)应变对正交相Ca2 P0.25 Si0.75能带结构及光学性质的影响.pdf
- 0.8设计系数用X80管线钢在近中性pH溶液中的应力腐蚀开裂行为.pdf
- 0.20mm CGO硅钢高温退火Goss晶粒起源及异常长大行为研究.pdf
- 0Cr16Ni5Mo低碳马氏体不锈钢的热变形行为及其热加工图.pdf
- 0Cr17Ni4Cu4Nb钢制螺钉断裂原因分析.pdf
- 1.5MW风机叶片模具加热工艺研究与技术创新.pdf
- 1.5MW风机叶片VARI工艺模拟分析及验证.pdf
- 2.5维机织复合材料低速冲击性能研究.pdf
- 2.25Cr-1Mo钢后续热处理中的磷偏聚行为.pdf
- 2A50锻铝三点弯曲试验与高分辨率CT成像分析.pdf
- 2A12与2A11铝合金超声波焊接工艺与组织研究.pdf
- 2MW风机复合材料叶片材料及工艺研究.pdf
- 3Cr2W8V模具钢激光表面相变硬化层性能的研究.pdf
- 3D打印技术及先进应用研究进展.pdf
- 3D打印技术研究现状和关键技术.pdf
- 5%鱼藤酮悬浮剂的研制.pdf
- 富富资料
- 该用户很懒,什么也没介绍
相关文档
- “离位”增韧复合材料准静态压入损伤特性研究.pdf2021-11-235页
- “神舟七号”飞船舱外航天服防护头盔组件的研制.pdf2021-11-233页
- “十二五”复合材料发展重点和方向解读.pdf2021-11-232页
- “珠串”堆叠超结构的介孔铁酸锌的制备与表征.pdf2021-11-235页
- (001)应变对正交相Ca2 P0.25 Si0.75能带结构及光学性质的影响.pdf2021-11-236页
- 0.8设计系数用X80管线钢在近中性pH溶液中的应力腐蚀开裂行为.pdf2021-11-237页
- 0.20mm CGO硅钢高温退火Goss晶粒起源及异常长大行为研究.pdf2021-11-237页